



Una tecnologia made in Italy che guiderà gli strumenti chirurgici dentro il nostro corpo, supporterà gli interventi in campo aerospaziale e l’ispezione di luoghi inaccessibili
Il gruppo di ricerca guidato da Edoardo Sinibaldi, del Centro di MicroBioRobotica di Pontedera (Pisa) dell’Istituto Italiano di Tecnologia (IIT) in collaborazione con la Scuola Superiore Sant’Anna ha appena brevettato il primo robot flessibile in grado di evitare ostacoli e zone sensibili o pericolose in luoghi difficilmente accessibili.
Le principali applicazioni riguardano sia il campo medico, per la veicolazione di strumenti chirurgigi all’interno del corpo umano, che l’ambito aerospaziale, per ispezionare sistemi con componenti poco raggiungibili. Il robot flessibile, inoltre, potrà essere utilizzato anche in operazioni di ricerca e soccorso in ambienti di difficile accesso.
La tecnologia brevettata consente al robot di costruirsi una guida tramite il suo stesso avanzamento, senza usare supporti esterni.
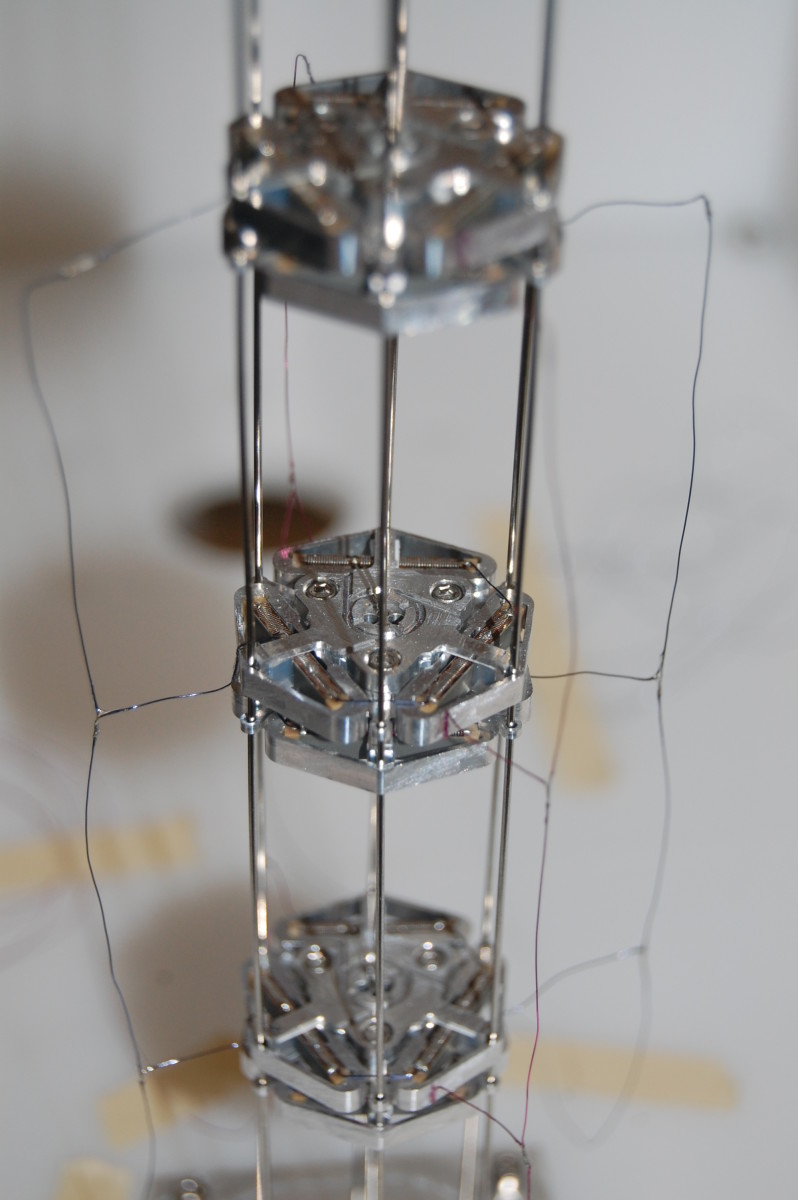
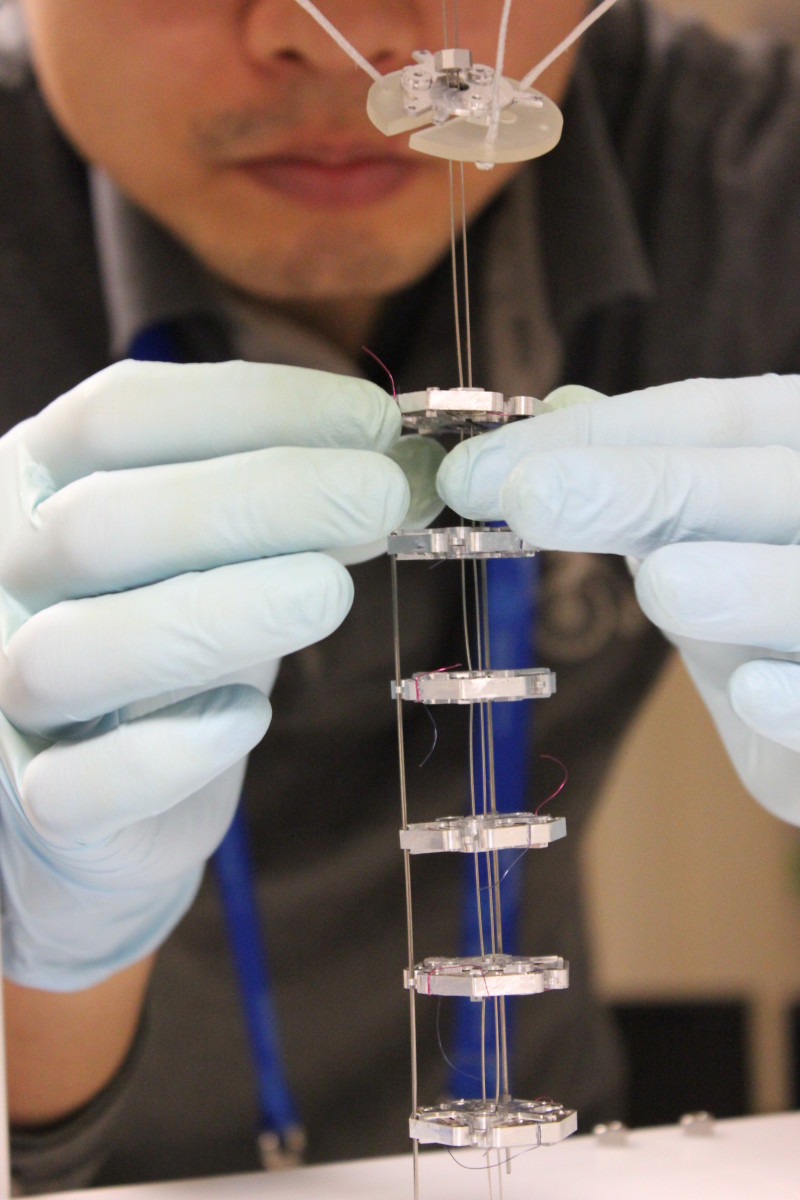
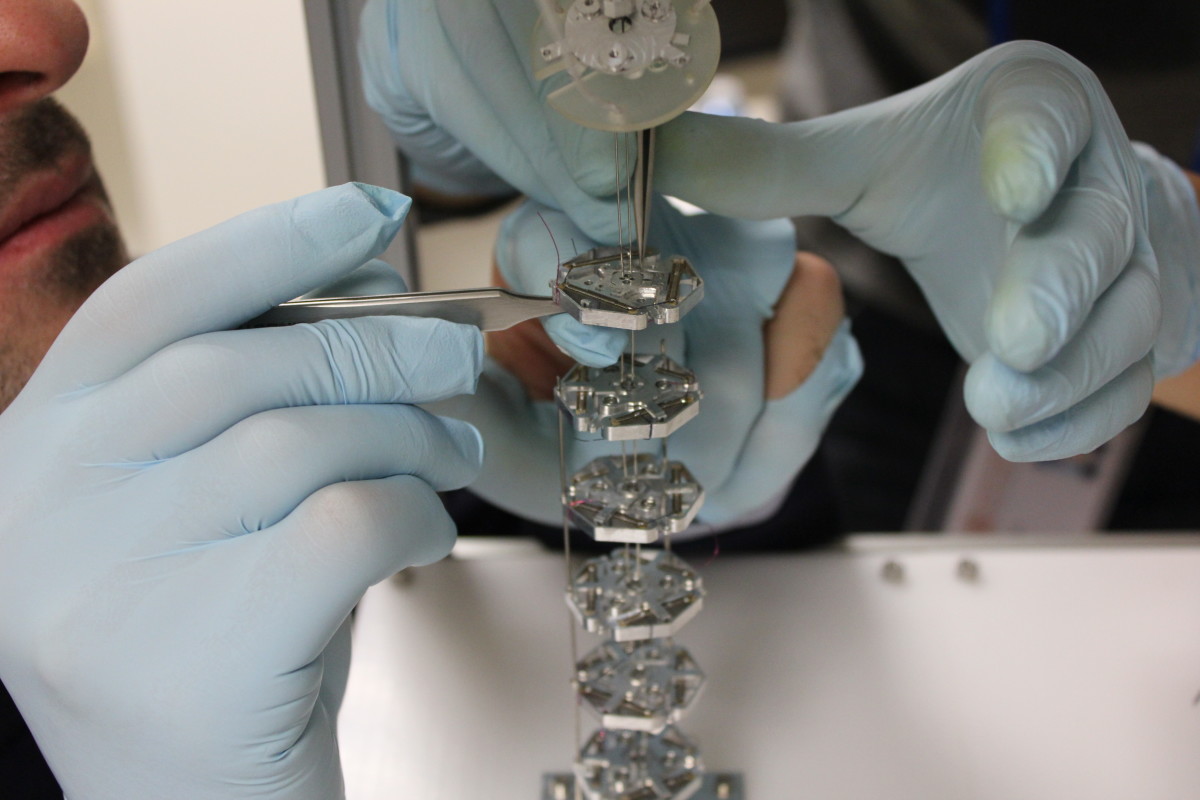
Nello specifico, come si vede nelle foto allegate, il robot è costituito da due strumenti flessibili identici e “intrecciati”, che avanzano uno sull’altro supportandosi a vicenda, in modo alternato. Ciascuno dei due strumenti può diventare temporaneamente rigido e guidare con precisione l’altro. Per cambiare rigidezza, la forma dello strumento flessibile viene stabilizzata tramite un’unica coppia di fili elettrici che portano corrente a piccoli blocchi di materiale piezoelettrico, un materiale speciale che si dilata quando percorso da elettricità. Il robot è in grado di compiere traiettorie complesse e con grande curvatura, utili per circumnavigare ogni tipo di ostacolo. Una delle peculiarità, che rendono unica questa innovazione, è la capacità di raggiungere un obiettivo evitando di toccare ostacoli o zone sensibili con tutto il corpo dello strumento e non solo con la sua estremità. Questa problematica è al momento ancora un hot topic in campo tecnologico.
«Siamo partiti da uno studio teorico e la configurazione “intrecciata” emersa come possibile soluzione al problema è assolutamente innovativa» racconta Edoardo Sinibaldi ingegnere aerospaziale, responsabile dello studio «È il frutto di un lavoro lungo e articolato, in cui abbiamo saputo integrare e valorizzare le nostre competenze e l’anima multiculturale del nostro team di ricerca», conclude Sinibaldi. Nello studio sono coinvolti anche Byungjeon Kang e Risto Kojcev, due studenti di dottorato della Scuola Superiore Sant’Anna di Pisa rispettivamente un ingegnere meccanico sudcoreano e un ingegnere elettronico macedone.
Il prototipo sviluppato dai ricercatori IIT con il suo design flessibile “dimostra performance superiori a quelli attualmente disponibili nel panoramica della robotica mondiale”, fanno sapere dalla Scuola Sant’Anna. Nei prossimi 3-5 anni potrebbero essere sul mercato i primi modelli sviluppati per applicazioni specifiche che sfruttano l’innovazione del Centro IIT di Pontedera.
Scuola Sant'Anna: brevettato il 1° robot flessibile che evita gli ostacoli




